안녕하세요 텐자입니다:) 오늘은 지난번에 이어서 서보모터 시운전을 해보겠습니다.얼마 전 서보 모터와 HMI 통신 설정과 서보 모터 축 설정, 그리고 오토 튜닝까지 해봤습니다.이전 내용이 궁금하신 경우 아래 링크를 참고해주세요.
[오므론] HMI와 PLC 통신접속 안녕하세요! 텐자입니다~ 🙂 오늘은 오므론의 PLC를 이용하여 서보모터 제어실습을 위한 PLC와 HMI… blog.naver.com
[오므론] HMI와 PLC 통신접속 안녕하세요! 텐자입니다~ 🙂 오늘은 오므론의 PLC를 이용하여 서보모터 제어실습을 위한 PLC와 HMI… blog.naver.com
인기글



[오므론] 서보모터 파라미터 설정(축설정) 안녕하세요! 텐저입니다. 드디어 PLC에서 서보 모터를 제어하기 위한 첫걸음을 시작했습니다! 오므론의… blog.naver.com
[오므론] 서보모터 파라미터 설정(축설정) 안녕하세요! 텐저입니다. 드디어 PLC에서 서보 모터를 제어하기 위한 첫걸음을 시작했습니다! 오므론의… blog.naver.com
[오므론] 서보모터 오토튜닝(자동조정) 안녕하세요 텐저입니다! 🙂 지난번 오므론 PLC에서 서보모터를 제어하기 위해 축설정을 해보았습니다.···blog.naver.com
[오므론] 서보모터 오토튜닝(자동조정) 안녕하세요 텐저입니다! 🙂 지난번 오므론 PLC에서 서보모터를 제어하기 위해 축설정을 해보았습니다.···blog.naver.com
서보모터 시운전
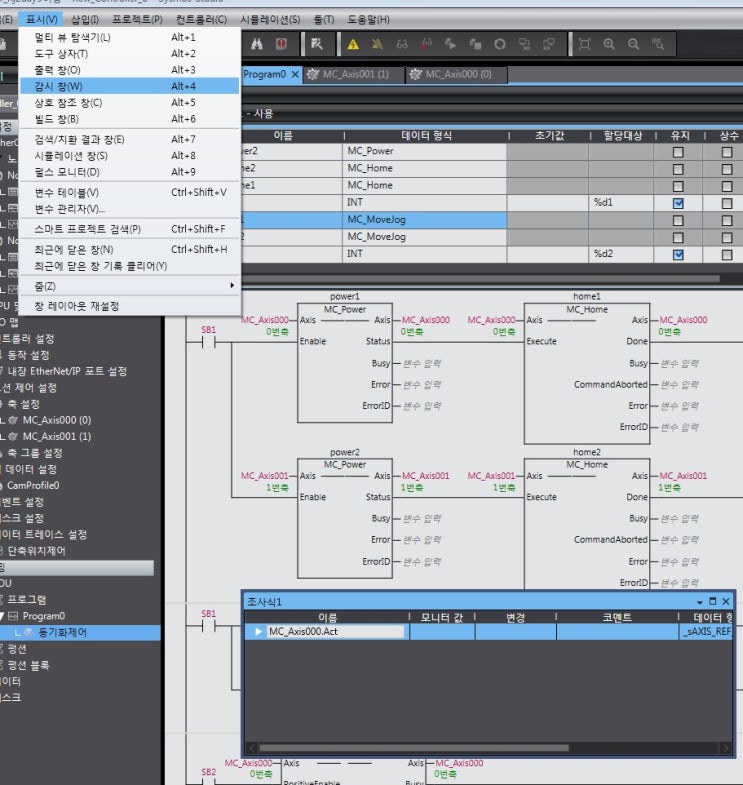
시운전에 필요한 모든 설정을 마치고 드디어 시운전을 해볼 차례입니다.

그 축의 오른쪽 클릭 후 MC 시운전 시작을 누릅니다.
통신 접속 등 주의사항을 확인하고 확인을 눌러 진행하겠습니다.

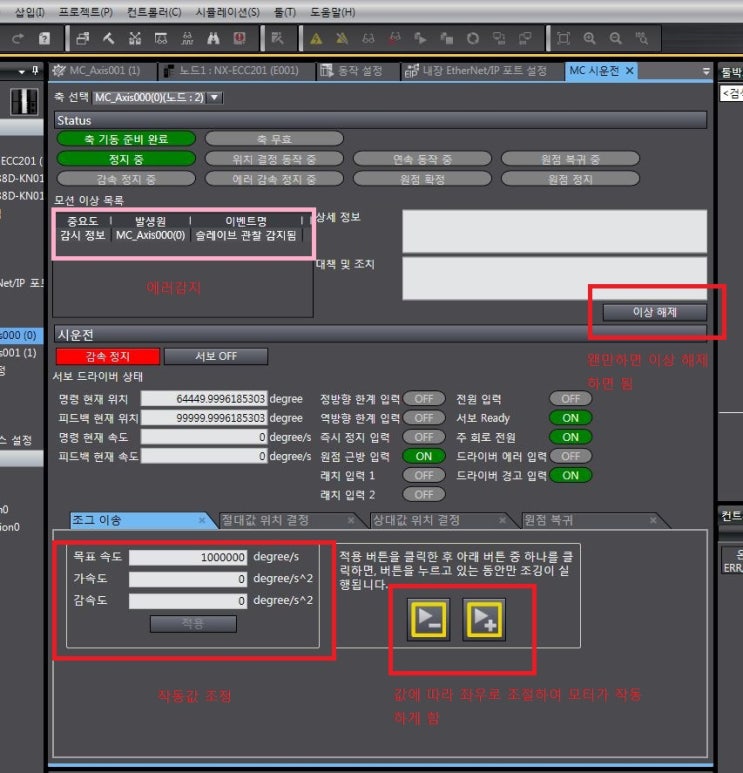
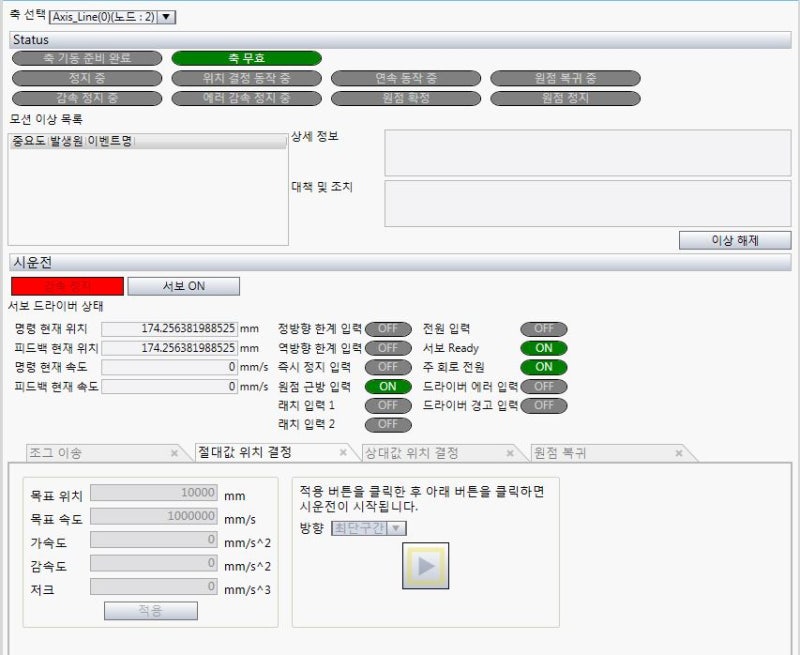
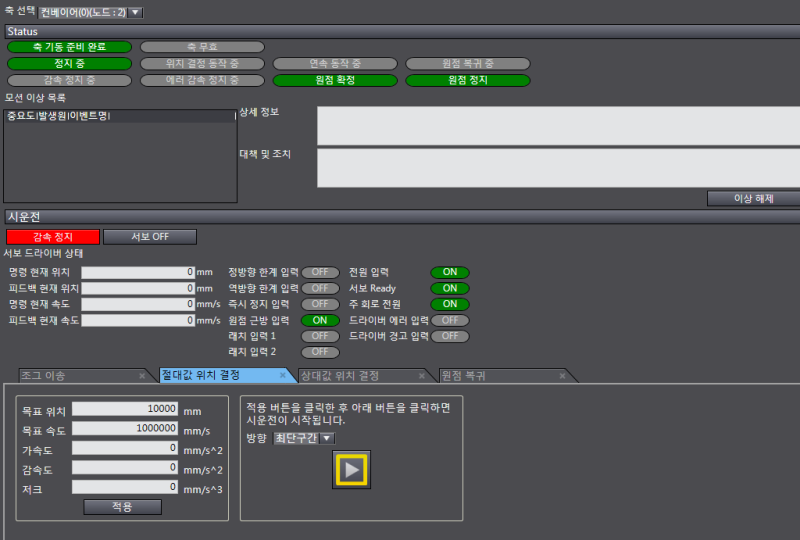
그러면 위와 같은 시운전을 할 수 있는 창이 나옵니다.각 상태에 따라 녹색으로 라이트가 켜지고 아래로는 작은 송, 절대치 위치 결정, 상대치 위치 결정, 원점 복귀로 구분할 수 있습니다.그리고 원하는 목표 속도 값을 입력한 후 시운전 버튼을 누르면 서보 모터가 작동하면서 시운전이 시작되는 것을 확인할 수 있습니다.
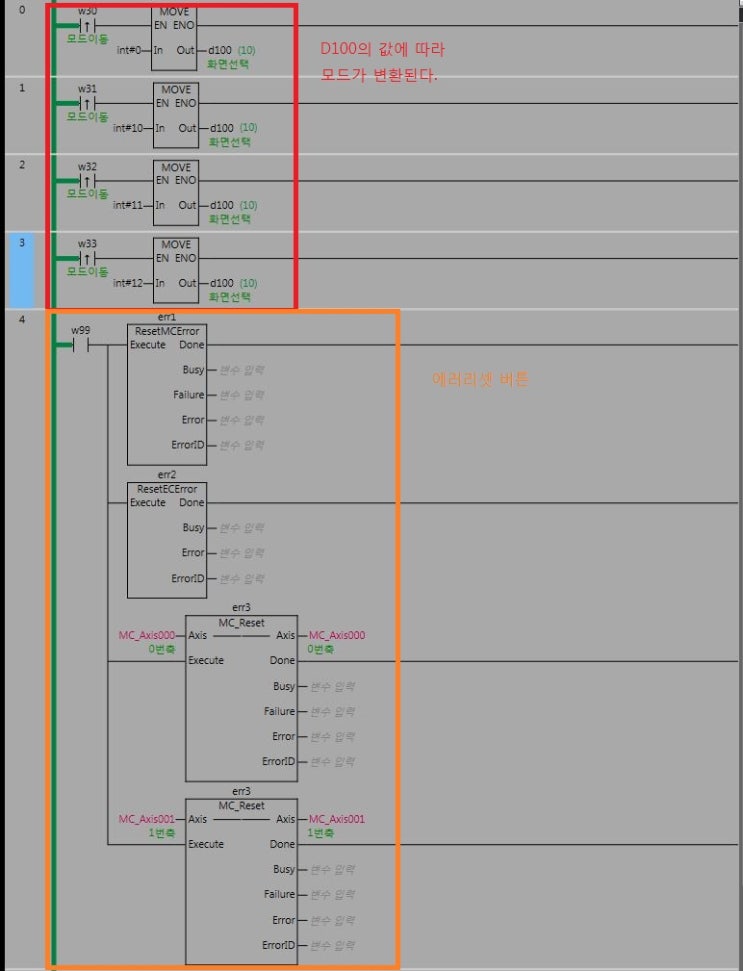
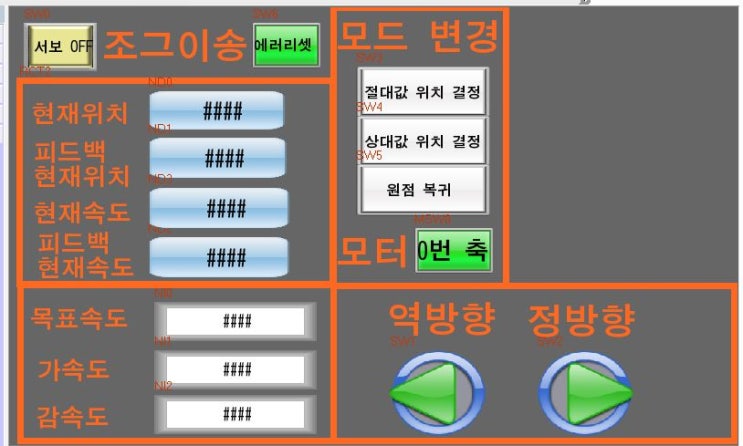
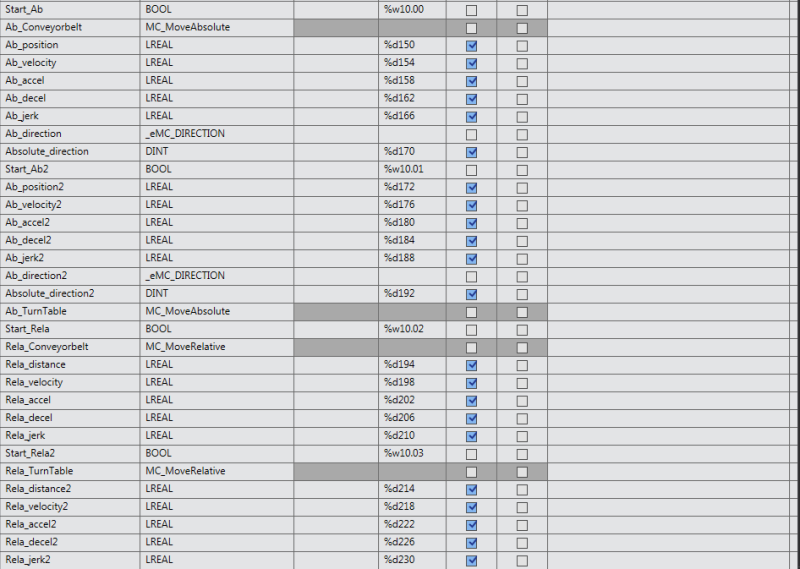
HMI 화면 구성 및 사다리 만들기이번에는 위의 시운전을 HMI로 화면에 구현해 보겠습니다.화면을 구현하여 시스맥 프로그램에서 래더를 작성하여 서로 통신하도록 하면 됩니다.상기 시운전 창을 HMI에서 동일하게 구현해 보았습니다.램프와 숫자 표시 기능 등을 활용했습니다. 살짝 ppt만드는 느낌이예요..)주소값 할당HMI와 PLC 간 통신을 위해 각 동작과 기능에 주소값을 동일하게 할당해야 합니다.주소값은 겹치거나 중복되지 않도록 크기에 맞게 할당해야 합니다.HMI와 PLC 간 통신을 위해 각 동작과 기능에 주소값을 동일하게 할당해야 합니다.주소값은 겹치거나 중복되지 않도록 크기에 맞게 할당해야 합니다.왼쪽 메뉴에서 PLC 기능을 눌러 페이지 전환 기능도 추가해야 합니다.HMI에서 시운전 화면을 구현했다면 이제 시스맥 프로그램으로 래더를 작성할 차례입니다.<래더>큰 틀은 HMI 버튼을 클릭하면 PLC에서 그 기능을 제어하여 서보모터가 작동시키는 원리입니다.큰 틀은 HMI 버튼을 클릭하면 PLC에서 그 기능을 제어하여 서보모터가 작동시키는 원리입니다.큰 틀은 HMI 버튼을 클릭하면 PLC에서 그 기능을 제어하여 서보모터가 작동시키는 원리입니다.오늘은 서보 모터의 시운전에 대해 이야기했습니다.다음은 서보모터 직선보간으로 찾아뵙겠습니다. 😀 #실습 #하이테크과정 #성남폴리텍대학 #스마트자동화 #PLC #오므론 #서보모터 #시운전 #HMI